 |
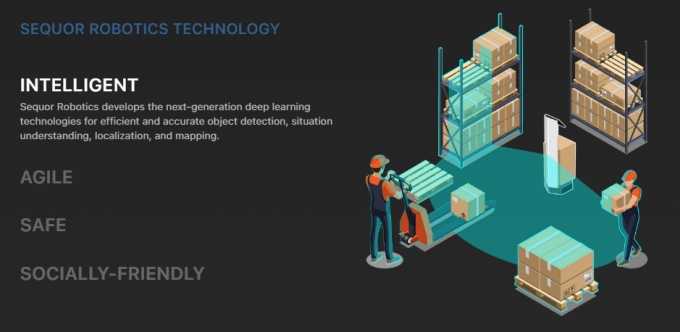
ММФкОюЗЮКИЦННКДТ МПяДы РќБтСЄКИАјЧаКЮ ПРМКШИ БГМі ЗЮКПЧаНРПЌБИНЧРЧ ЧйНЩ ПЌБИПјЕщАњ МПяАњЧаАэЕюЧаБГ УтНХ ПЃСіДЯОюЕщРЛ СжУрРИЗЮ СіГЧи 7Пљ МГИГЕЦДй.
ЧіРч НУАјАЃ ЗЮКП КъЗЙРЮРЛ РЬПыЧб ЦЧДмЁЄСІОю И№ЕтАњ ДКЗВ 3D БтЙн РЮСі И№Ет БтЙн ТїММДы ЙАЗљЗЮКП VMR(Vision-based autonomous Mobile Robot)РЛ АГЙпЧЯАэ РжДй. ЛчШИ ФЃШРћ РкРВСжЧр, КёРќ РЖЧе ГЛКёАдРЬМЧ, РЬЛѓ АЈСі БтМњ БтЙн ЙАЗљ ЗЮКП МжЗчМЧЕЕ СиКё СпРЬДй.
БтСИ AMR(Autonomous Mobile Robot)РК ЙЋРЮ ПюМл ТїЗЎ(AGV, Automated Guided Vehicle)РЧ ДмСЁРЛ БиКЙЧЯБт РЇЧи АГЙпЕЦРИГЊ ЗЮКП МвЧСЦЎПўОю БтМњРЧ ЧбАшЗЮ ГЗРК ШПРВМКРЛ КИРЬАэ АјАЃРЬ КЙРтЧб АїПЁМ РћРРЧЯСі ИјЧи ЛѓПыШПЁ ОюЗСПђРЛ АоОњДй.
ММФкОюЗЮКИЦННКАЁ АГЙпЧЯДТ VMRРК ЗЮКП МвЧСЦЎПўОюПЭ ФФЧЛХЭ КёРќ БтМњРЛ АэЕЕШЧи ДѕПэ КќИЃАд ПђСїРЬИч ШПРВМКРЛ ШЎКИЧЯАэ ШЏАц КЏШПЁ ДыРРЧЯДТ АЭРЬ ЦЏТЁРЬДй.
РЬИІ ХфДыЗЮ ЛяМКРЃНКХфИЎ, ЕЮЧкСю, ФнЗЮММПђФкЦлЗЙРЬМЧ Ею ЙАЗљМОХЭИІ ПюПЕЧЯДТ БтОїЕщАњ ЧдВВ НЧСѕЛчОїРЛ СјЧрЧЯАэ РжДй. ЦЏШї ЛяМКРЃНКХфИЎРЧ ОзМПЗЏЗЙРЬЦУ ЧСЗЮБзЗЅ WIT(Welstory Innovation Track) 4БтПЁ ТќПЉЧЯИч ЛчОїШПЁ МгЕЕИІ ГЛАэ РжДй.
ММФкОюЗЮКИЦННКАЁ МБСЄЕШ ЕіХзХЉ ЦСНКДТ СпБтКЮАЁ СіПјЧЯДТ 'УЪАнТї НКХИЦЎОї 1000+' ЧСЗЮСЇЦЎРЧ РЯШЏРИЗЮ БтМњЗТРЬ ПьМіЧб НКХИЦЎОїРЛ МБСЄЧи 3ГтАЃ УжДы 15ОяПјРЧ БтМњАГЙп РкБнРЛ СіПјЧЯДТ ЧСЗЮБзЗЅРЬДй.
ЧиПм ИЖФЩЦУ РкБн ЕюЕЕ СіПјЙоРИИщ 17ОяПјБюСі ШЎКИ АЁДЩЧЯДй. БтСИ ЦСНКПЁ КёЧи СіПјБн БдИ№АЁ 3Йш АЁЗЎ ХЋ ИИХ БтМњЗТЁЄЛчОїМК Ею ЦђАЁ БтСиРЬ БюДйЗгДй.
ПРСЄПь ММФкОюЗЮКИЦННК ДыЧЅДТ "МвЧСЦЎПўОюЛгИИ ОЦДЯЖѓ И№ЙйРЯ ЗЮКП ЧУЗЇЦћБюСі РкУМ АГЙпЧЯАэ РжДй. РЮАјСіДЩ(AI)РЬ СЂИёЕШ ЗЮКП БтМњРК И№ЙйРЯ ЗЮКП ЧУЗЇЦћЛгИИ ОЦДЯЖѓ ДйОчЧб ЗЮКП ЦћЦбХЭЗЮ ШЎРх АЁДЩЧЯДй"Аэ ИЛЧпДй.
РќОЦЖї ЧЛУГЧУЗЙРЬ УЅРгНЩЛчПЊРК "ЗЮКППЁАд АЁРх ХЋ ШЏАцРћ КЏМіДТ РЮАЃРЧ ПђСїРг"РЬЖѓИч "КёРќ БтЙн ГзКёАдРЬМЧ БтМњРК УжМвЧбРЧ МОМЗЮ СжКЏ ШЏАцРЧ ПђСїРгРЛ РаАэ КќИЃАэ ОШСЄРћРЮ СжЧрРЛ ЧбДй. РЬДТ ЗЮКП НУРхРЬ ШЎДыЕЪПЁ ЕћЖѓ ДѕПэ КћРЛ ЙпЧв АЭ"РЬЖѓАэ ЧпДй.
[ИгДЯХѕЕЅРЬ НКХИЦЎОї ЙЬЕ№Ою ЧУЗЇЦћ 'РЏДЯФмЦбХфИЎ']






!["ТїЖѓИЎ СзПЉДоЖѓ" ЧбБЙОюМБ, ЧиРћПЁ ГГФЁЁІЦјЧрПЁ АэИЗЕЕ ХЭСЎ[ДКНКМгПРДУ]](https://thumb.mt.co.kr/11/2024/05/2024051313251714328_1.jpg/dims/resize/100x/optimize/)









![[ИЃЦї]РќБтТї ЙшХЭИЎ, 'РЬ ШИЛч' МеПЁ РЬТїРќСіЗЮЁІСЄКЮЕЕ ОіСіУД](https://thumb.mt.co.kr/11/2024/05/2024051408294576731_1.jpg/dims/resize/100x/optimize/)







![[ОЫИВ] СІ13ШИ УЛГтБтОїАЁДыШИ КЛМБ СјУт 43АГЦР МБСЄ](https://thumb.mt.co.kr/11/2024/05/2024051011343648007_1.jpg/dims/resize/100x/optimize/)


















![[ПЕЛѓ]"РЬАРЮ, МеШяЙЮПЁ ЦаНК ОШ Чи НЧСЁ"ЁІПфИЃДмРќ РЬ РхИщ 'НУВј'](https://thumb.mt.co.kr/10/2024/02/2024021605405373481_1.jpg/dims/resize/100x/optimize)













!['ЛБМвДЯ ЧјРЧ' БшШЃСп, ЙцМлАЁ МеР§ НУРл..'ЦэНКХфЖћ' ЦэС§Ёц'ЛчДчБЭ' УдПЕйэ [НКХИРЬНД]](https://menu.mt.co.kr/upload/main/2024/2024051614511081074001_mainTop.jpg)






![ЙЬБК ЧйНЩРќЗТ ЕППј, РќРя КвЛчЧв СЖРгИё 7Аї [PADO ЦэС§РхРЧ 'ЙЬБЙ Ды ЙЬБЙ']](https://i2.ytimg.com/vi/UbocpYuX_xk/hqdefault.jpg)


![ШЋМББй ШИРх "АнРкЧќ БИСЖ ЧбЙЬРЯ ЕПИЭ, ЕПОЦНУОЦ ЦђШРЧ АЗТЧб Ур" [2024 ХАЧУЗЇЦћ]](https://i1.ytimg.com/vi/pkVg4wXxvmM/hqdefault.jpg)




![ШЋМББй ШИРх "ЕПИЭ АШДТ РЉРЉРЬ ЕЩ Мі РжНРДЯДй" [2024 ХАЧУЗЇЦћ]](https://i4.ytimg.com/vi/7iWOChZ79SM/hqdefault.jpg)
![БЄЛъГыСЖ КЛСј, ЦЎЗГЧС СіСі РЬРЏ [PADO ЦэС§РхРЧ 'ЙЬБЙ Ды ЙЬБЙ']](https://i4.ytimg.com/vi/olBkk967o4E/hqdefault.jpg)




![ЦЎЗГЧСvsЙйРЬЕч, 6АГСж КИИщ Дф ГЊПТДй [PADO ЦэС§РхРЧ 'ЙЬБЙ Ды ЙЬБЙ']](https://i4.ytimg.com/vi/7kc1ddGnWtE/hqdefault.jpg)