




박 교수는 지성호·신재희 대학원생과 폴리비닐리덴 플로라이드(PVDF) 필름을 기반으로 한 압전소자 액추에이터와 공진 구조로 설계된 자가 동작 곤충 모사 소프트로봇 구동 기술을 개발했다.
박 교수는 "최적의 매개변수와 공진설계를 통해 소프트로봇의 움직임을 효과적으로 증대할 수 있는 설계 가이드라인을 제시했다"며 "이는 전원 공급이 어려운 환경에서 소프트로봇의 자가 동작을 연구하는 기초가 될 것"이라고 설명했다.
한편 이번 연구는 한국연구재단과 정보통신기획평가원의 지원을 받아 수행됐다. 연구결과는 '저주파 기계적 자극을 통해 구동되는 마찰 전기 기반 필름형 소프트 로봇'(Triboelectric-Based Film-Type Soft Robot Driven via Low-Frequency Mechanical Stimuli)이라는 제목으로 한국정밀공학회 국제학술지 'International Journal of Precision Engineering and Manufacturing-Green Technology'(IJPEM-GT) 7월호에 게재됐다. 논문은 다음달 30일까지 무료로 다운로드할 수 있다.
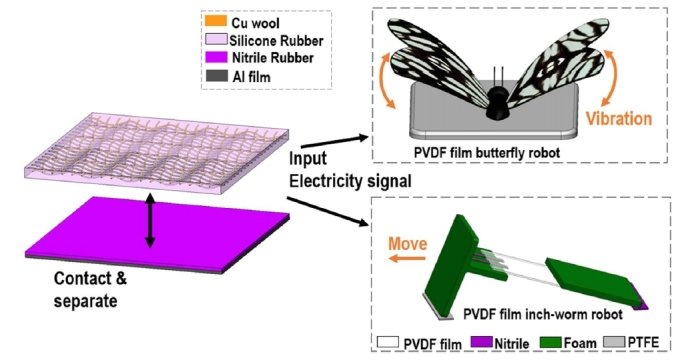 |
| 박진형 메카트로닉스공학부 교수팀의 연구자료 이미지./사진제공=한기대 |






!["네 남편이 나 사랑한대" 친구의 말…두 달 만에 끝난 '불같은' 사랑 [이혼챗봇]](https://thumb.mt.co.kr/11/2024/09/2024091814092355964_2.jpg/dims/resize/100x/optimize/)







!["더 못 죽인 게 한" 섬뜩한 웃음…'살인 공장'까지 만든 악마들[뉴스속오늘]](https://thumb.mt.co.kr/11/2024/09/2024091317451143015_1.jpg/dims/resize/100x/optimize/)
![고속도로 갓길에 노인이…집주소 보고 깜짝, 시민들이 도왔다[영상]](https://thumb.mt.co.kr/11/2024/09/2024091905084433800_1.jpg/dims/resize/100x/optimize/)

![야산에 묻은 돈가방, 3억 와르르…'ATM 털이범' 9일 만에 잡은 비결[베테랑]](https://thumb.mt.co.kr/11/2024/09/2024091212112247019_1.jpg/dims/resize/100x/optimize/)


![짓밟고 헤어드라이기 학대…여행가방에 갇혀 숨진 9살 의붓아들 [뉴스속오늘]](https://thumb.mt.co.kr/11/2024/09/2024091016570375164_1.jpg/dims/resize/100x/optimize/)















![짓밟고 헤어드라이기 학대…여행가방에 갇혀 숨진 9살 의붓아들 [뉴스속오늘]](https://thumb.mt.co.kr/10/2024/09/2024091016570375164_1.jpg/dims/resize/100x/optimize)











!["꼭 가야 해" 사람 가득 실은 배 30분 만에 침몰…292명 대참사[뉴스속오늘]](https://thumb.mt.co.kr/10/2023/10/2023100611053583558_1.jpg/dims/resize/100x/optimize)

















![미 항모전단 vs 중 미사일, 중 상륙전대 vs 대만 화력, 결과는? [PADO 미중해전-대만전쟁 통합본]](https://i1.ytimg.com/vi/lEr72j77ZzU/hqdefault.jpg)
!["한동훈 대권, 기대감 깎였다" vs "오세훈, 대권후보 되기 어려워" [터치다운the300]](https://i3.ytimg.com/vi/6Z2dBt9IFyQ/hqdefault.jpg)
![폼페이오 '한국 핵무장은 합리적', 1년 내 가능? [PADO 편집장의 '미국 대 미국']](https://i4.ytimg.com/vi/wvchef2TQTk/hqdefault.jpg)




![미리보는 2027년 대선 토론?...'계엄괴담'만 남긴 한동훈 이재명 회담, 실익은 누가 챙겼나 [터치다운the300]](https://i2.ytimg.com/vi/YRsKqtYrJb4/hqdefault.jpg)
![미국은 서울 지키기 위해 LA 포기할 수 있을까 [PADO 편집장의 '미국 대 미국']](https://i3.ytimg.com/vi/Ns3p-Y71aq4/hqdefault.jpg)
![푸틴의 허를 찌른 젤렌스키의 야심찬 대역습, 그러나..."우크라, 서방 지원 끊기면 한 달도 못버텨" [터치다운the300]](https://i4.ytimg.com/vi/_t2xAxdgJrE/hqdefault.jpg)




![한국엔 '전략 무기'가 없다. 전쟁 종결시킬 절대 무기는? [PADO 편집장의 '미국 대 미국']](https://i2.ytimg.com/vi/AFS2AKOChvU/hqdefault.jpg)
![尹의 애착남 "한동훈 언플, 세련되지 못해...윤통 망하라고 대표 시킨 거 아냐" [터치다운the300]](https://i1.ytimg.com/vi/HQBWVXAYxNo/hqdefault.jpg)
